ACMSimC: PMSM Control Simulation
ACMSimC: PMSM Control Simulation
Table of Content
Background
永磁电机作为一种因材料突破而得以普及的同步电机,不得不承认其如今在位置伺服领域的地位。此外,在轴向长度受到限制的场合,使用永磁电机的效果那是拔群的,比如电瓶车的轮毂电机等。但是,我最爱的还是优雅的感应电机。
感应电机的”高级玩法“一般都是在转子上做文章,主要是实心转子的各种变种,这里@哈默尼克。永磁电机的”高级“玩法(表贴、内嵌、V型这些肯定就不算了哈)则可以从定子和转子两方面入手。比如可以把永磁体放到定子上形成开关磁链电机,可以疯狂减少定子槽数形成分数槽电机,可以把永磁体每隔一个极才放一个形成 Consequent Pole 电机,也可以把永磁体放置成辐条状且为 Consequent Pole 形式则称为游标电机,还可以烧钱玩 Halbach Array 减少轭部的钢的用量等。
Prerequisite
Installed the software mentioned from EP01.
Mathematic Models (Ref: Zhiqian Chen 2003)
The stator voltage equations on rotating d-q frame.
\[\left[\begin{array}{c}{v_{d}} \\ {v_{q}}\end{array}\right]=\left[\begin{array}{cc}{R+p L_{d}} & {-\omega_{r e} L_{q}} \\ {\omega_{r e} L_{d}} & {R+p L_{q}}\end{array}\right]\left[\begin{array}{c}{i_{d}} \\ {i_{q}}\end{array}\right]+\left[\begin{array}{c}{0} \\ {\omega_{r e} K_{E}}\end{array}\right]\] \[\Rightarrow\left\{ \begin{array}{l} {v_d} = R{i_d} + p{L_d}{i_d} - {\omega _{re}}{L_q}{i_q}\\ {v_q} = R{i_q} + p{L_q}{i_q} + {\omega _{re}}{L_d}{i_d} + {\omega _{re}}{K_E} \end{array} \right.\] \[\Rightarrow\left\{ \begin{array}{l} {L_d}p{i_d} = {v_d} - R{i_d} + {\omega _{re}}{L_q}{i_q}\\ {L_q}p{i_q} = {v_q} - R{i_q} - {\omega _{re}}{L_d}{i_d} - {\omega _{re}}{K_E} \end{array} \right.\]The stator voltage equations on stationary $\alpha$-$\beta$ frame.
\[\left[\begin{array}{c}{v_{\alpha}} \\ {v_{\beta}}\end{array}\right]=\left[\begin{array}{cc}{R+p L_{\alpha}} & {p L_{\alpha \beta}} \\ {p L_{\alpha \beta}} & {R+p L_{\beta}}\end{array}\right]\left[\begin{array}{c}{i_{\alpha}} \\ {i_{\beta}}\end{array}\right]+\omega_{r e} K_{E}\left[\begin{array}{c}{-\sin \theta_{r e}} \\ {\cos \theta_{r e}}\end{array}\right]\] \[\Rightarrow\begin{aligned}\left[\begin{array}{c}{v_{\alpha}} \\ {v_{\beta}}\end{array}\right]=R\left[\begin{array}{c}{i_{\alpha}} \\ {i_{\beta}}\end{array}\right] &+p L_{0}\left[\begin{array}{c}{i_{\alpha}} \\ {i_{\beta}}\end{array}\right]+\omega_{r e} K_{E}\left[\begin{array}{c}{\sin \theta_{r e}} \\ {\cos \theta_{r e}}\end{array}\right] \\ &+p L_{1}\left[\begin{array}{cc}{\cos 2 \theta_{r e}} & {\sin 2 \theta_{r e}} \\ {\sin 2 \theta_{r e}} & {-\cos 2 \theta_{r e}}\end{array}\right]\left[\begin{array}{c}{i_{\alpha}} \\ {i_{\beta}}\end{array}\right] \end{aligned}\]where position dependent inductances are defined as follows
\[\begin{aligned} L_{\alpha} &=L_{0}+L_{1} \cos 2 \theta_{r e} \\ L_{\beta} &=L_{0}-L_{1} \cos 2 \theta_{r e} \\ L_{\alpha \beta} &=L_{1} \sin 2 \theta_{r e} \\ L_{0} &=\frac{\left(L_{d}+L_{q}\right)}{2} \\ L_{1} &=\frac{\left(L_{d}-L_{q}\right)}{2} \end{aligned}\]**We will use the d-q model for simulation. I mean that it does not matter what reference frame your model is in. Just simulate it correctly and that’s all. ** Oh, I almost forget. One more thing: the torque equation:
\[T_{em}=n_{pp}\left(\psi_{d} i_{q}-\psi_{q} i_{d}\right)=n_{pp}\left[K_E i_{q}+\left(L_{d}-L_{q}\right) i_{d} i_{q}\right]\]This equation tells us even if $K_E$ is zero (i.e., no permanent magnet), there is still torque, which give rise to a new type of synchronous machine called SynRM (Synchronous Reluctance Machine).
Codes (Check out the pmsm branch at my Github page)
看了代码以后,可能有同学会问了,为什么不把感应电机和永磁电机归到一起?
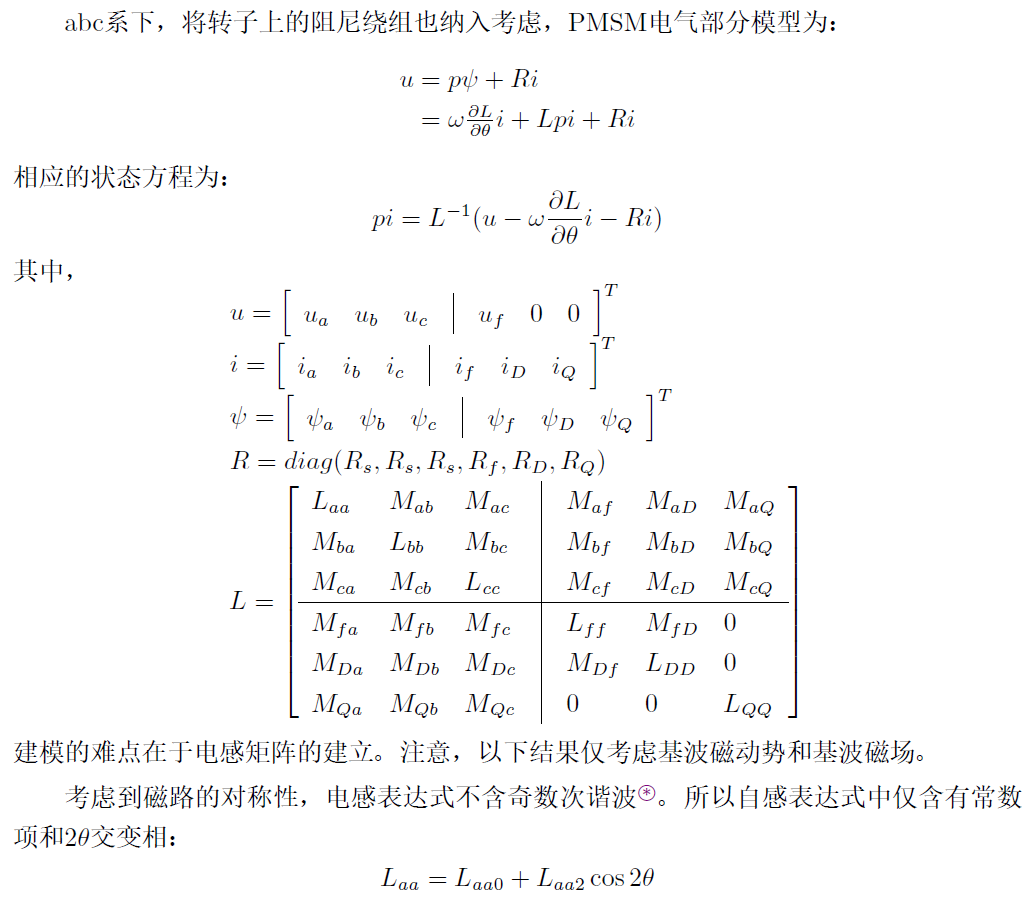
其实,我一开始用 Python 做控制仿真的时候,就是直接对带阻尼绕组的同步电机进行建模的(见下图)。也就是说,一个模型包罗万象。但是缺点也很明显,这样做会让代码看起来复杂很多,多出很多不必要的状态变量。所以我不推崇大一统仿真,但是大一统理论依旧是很有意思的东西。
Future Topics (Updated)
- C语言电机仿真架构 / framework in C language (done in EP01)
- 矢量控制 / Vector control (done in EP02)
- 永磁电机的仿真 (done in this article)
- 为什么前向欧拉法是个大坑?
- 永磁电机的滑模观测器
- 系统控制参数的可视化与优化框架 / Visualization and optimization of system control parameters
- 电机设计的电路参数拟合
- 变步长数值积分 / DoPri54
- 电机参数自整定
- 电流环系数设计
- 转速环系数设计
- 转动惯量辩识
- 无速度传感器系统中的转动惯量辨识
- 自抗扰控制
- 基于带宽指标的自抗扰控制系数设计
- 预测控制(预测电流控制,PCC)与优化目标
- 全局稳定转速自适应观测器设计
- 一种简单的自适应观测器(模型参考自适应系统,MRAS)设计及其存在的问题
- 逆变器非线性建模 / inverter nonlinearity
- SPWM建模
- SVPWM建模
- 饱和建模 / modeling of saturation
- 结合场的建模策略(查表法)
- 如何绘制任意控制策略的电机运行工况效率图?
- 非理想电流测量环节建模(温飘与不对称)
- 母线电容建模和无轴承电机的仿佛有UPS控制
- 异步伺服(异步电机的位置控制媲美永磁电机的关键是?)
- 低成本单母线电流传感器驱动的实现
- 无轴承感应电机建模
- 基于扩展反电势模型的无传感器控制
- 基于 Active Flux 模型的无传感器控制
- 三维模型的绘制技巧 / SolidWorks Modeling (done in
)
- 番外:使用免费有限元软件实现感应电机的设计与优化
- 番外:使用旋转静态场有限元实现电机转矩脉动的超准确分析(嗯,堪比瞬态场)
- 番外:Notched Rotor(介于表贴和内嵌之间的一种转子)永磁电机的设计
- 番外:高速实心转子的设计与优化
- 番外:机器学习之电机建模竞赛
Leave a comment